Asynkronmotoren ( Kortslutningsmotoren ) er en svært mye brukt elektrisk motortype innenfor industri, bygningsautomasjon og andre bruksområder. Noen av grunnene til dette er at motortypen er svært enkel i oppbygging, den består bare av to deler, en rotor og en stator. Den enkle konstruksjonen gjør den svært robust og driftssikker, den er lite utsatt for feil og den krever lite vedlikehold.
Asynkronmotoren er derfor i dag den mest brukte motortypen i industien og i mange andre sammenhenger. Vi kan kort si at asynkronmotorens oppgave er å omforme elektrisk energi til mekanisk energi.
Asynkronmotorens virkemåte
Filmen under gir en introduksjon til asynkronmotorens virkemåte. Det samme innholdet er også forsølt gitt en videre beskrivelse i tekst og bilder under filmen.
Asynkronmotorens virkemåte baserer seg på en vekselvirkning mellom et roterende magnetfelt i en stillestående stator og et magnetfelt i en kortsluttet rotor som får et dreiemoment og som dras rundt av det roterende magnetfeltet i statoren.
Animasjonen over viser hvordan asynkronmotoren har et roterende magnetfelt i en stillestående stator. Det roterende har sin årsak i den måten statoren er viklet på og det forhold at statorviklingene mates med en tre-fase drivspenning.
Det roterende magnetfeltet i statoren bidrar til å generere strømmer gjennom “rotorstavene” i den kortsluttede rotoren. Rotorstavene er kortsluttet i hver sin ende ved hjelp av to kortslutningsringer. Dette setter opp strømsløyfer med tilhørende magnetfelt i den kortsluttede rotoren. Det oppstår en “vekselvirkning” mellom de to magnetfeltene som medfører et dreiemoment i rotoren slik at denne vil dreie rundt.
Oppkobling av en asynkronmotor
Det finnes i hovedprinsipp to måter å koble opp en asynkronmotor på. For et 400V anlegg så kobler vi vanligvis statorviklingene til asynkronmotoren i stjerne. For et 230V anlegg så kobler man vanligvis statorviklingene i delta. Nedenunder så skal vi se litt nærmere på dette.
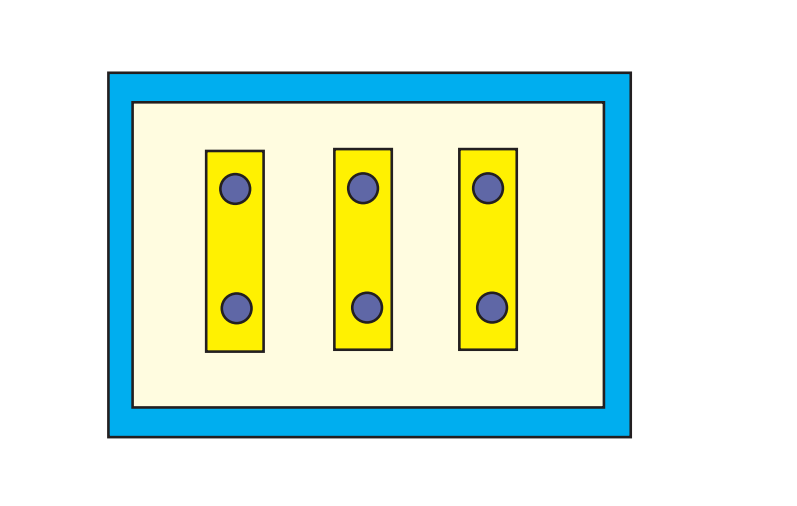
Oppkobling i delta (trekant).
Dette er en oppkobling som vi kan bruke hvis vi har en hovedstrømkrets med 230V spenning mellom fasene. Dette vil kunne være tilfellet ved for eksempel bruk av et IT forsyningsanlegg eller ved bruk av en frevensomformer som gir 230V ut til motoren.
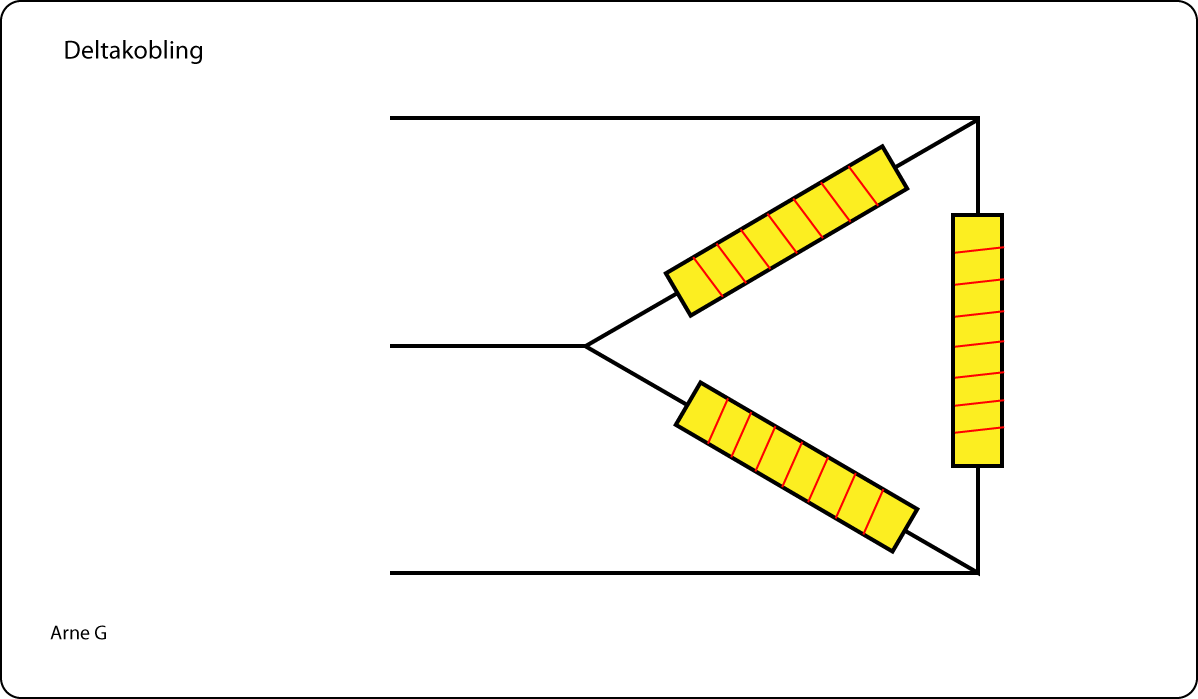
Tegningen over viser prinsippet for oppkobling av faseviklingene i delta.
Tegningen over viser hvordan vi rent praktisk kan koble faseviklingene i delta (trekant) ved hjelp av «lasker».
Oppkobling i stjerne
Dette er en oppkobling som vi kan bruke hvis vi har en hovedstrømkrets med 400V spenning mellom fasene. Dette vil kunne være tilfellet ved for eksempel bruk av et IT forsyningsanlegg eller ved bruk av en frevensomformer som gir 400V mellom fasene, ut til motoren.
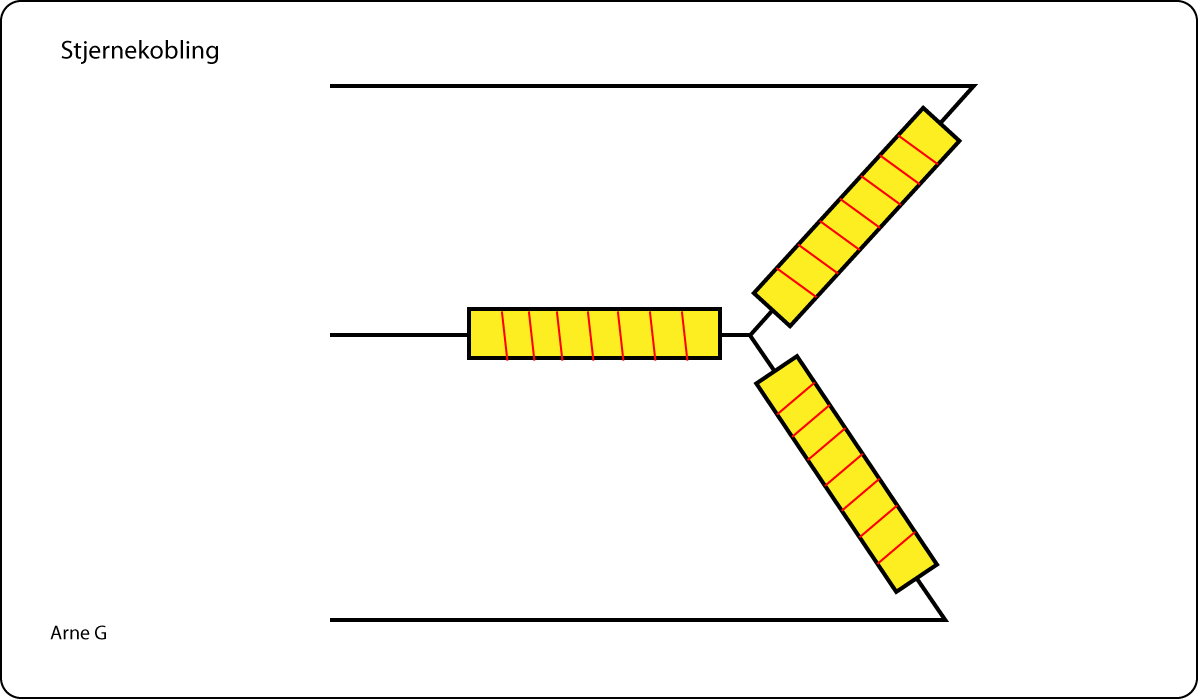
Tegningen over viser prinsippet for oppkobling av faseviklingene i delta.
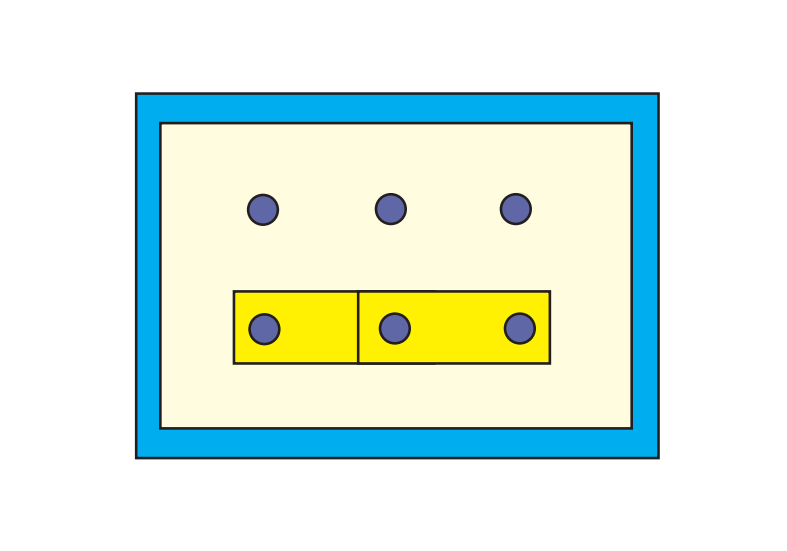
Tegningen over viser hvordan laskene i en koblingsboks skal monteres for at motoren skal være koblet i stjerne.
Lesing av merkeskilt
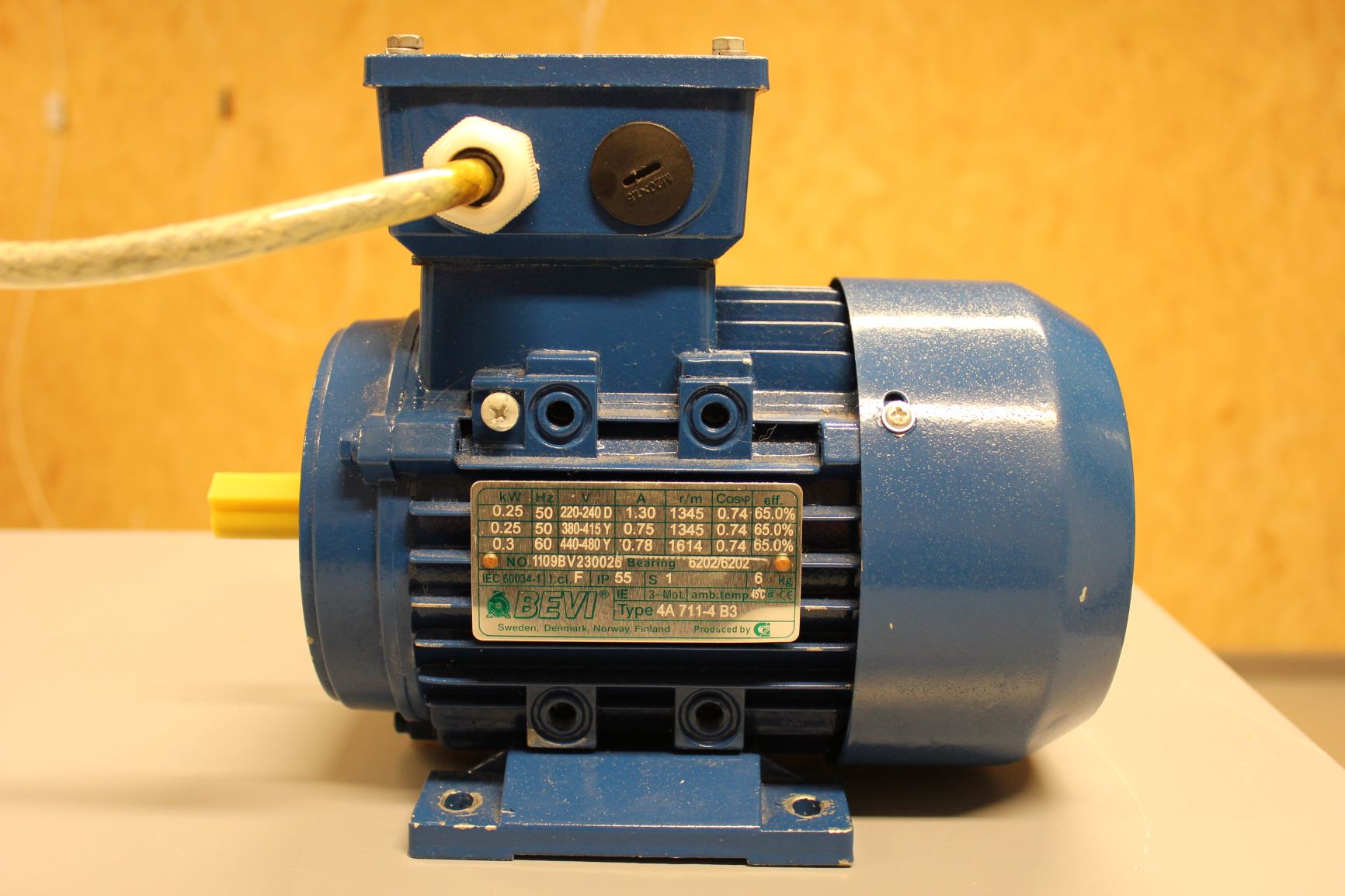
De aller fleste asynkronmotorer har et merkeskilt som gir en del nøkkeldata om motoren. Nedenunder så er det et fotografi av et slikt merkeskilt.
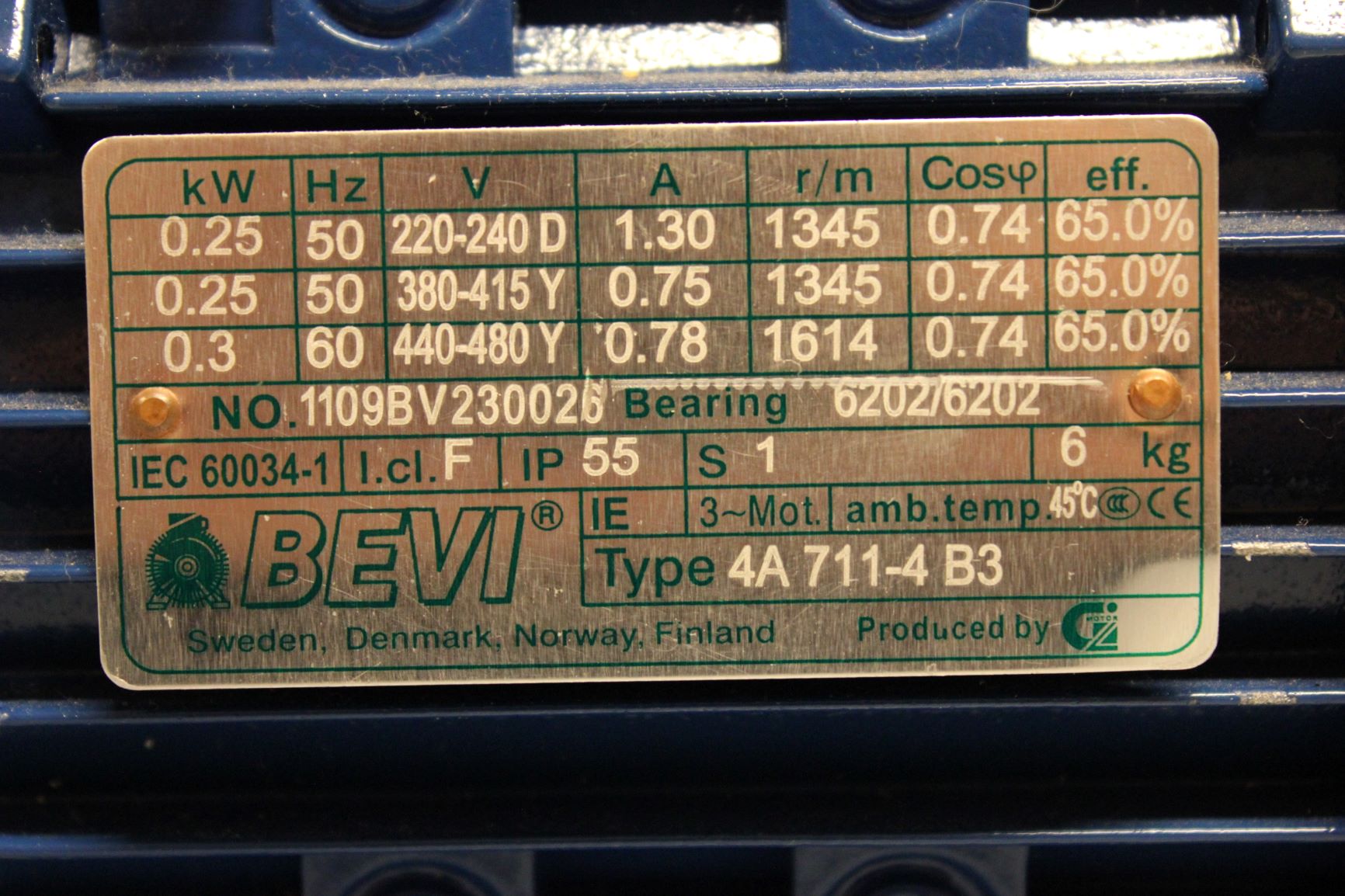
Dette betyr tallene på merkeskiltet:
- kW = Mekanisk effekt levert ut på akslingen i kilowatt.
- Hz = Frekvens
- V = Spenning i Volt.
- A = Strøm som motoren trekker ved oppgitt effekt.
- r/m = Omdreininger pr minutt (Synkronhastighet – Sakking)
- Cos (Φ) = Effektfaktor
- eff. = Mekanisk virkningsgrad
Her har vi også en video som gir en del utdypende detaljer om asynkronmotoren. Opplysningene helt mot slutten av videoen som sier at man kobler en fasespenning på 400V til en motor som er koblet i delta, stemmer sikkert med amerikanske forhold, men her i Norge så vil det være mer vanlig å bruke 230V opp mot en motor koblet i delta.
Beregning av belastningsstrøm.
En ganske vanlig situasjon det er at vi skal “dimensjonere” en elektrisk kurs for den elektriske asynkronmotoren. “Dimensjonere” vil i praksis si å velge riktig vern (for eksempel en riktig type automatsikring) og en riktig kabeltype og kabeldimensjon for motorkursen. For å kunne få til dette så behøver vi å kjenne til motorens “belastningsstrøm”, dvs “hvor mye strøm den trekker”.
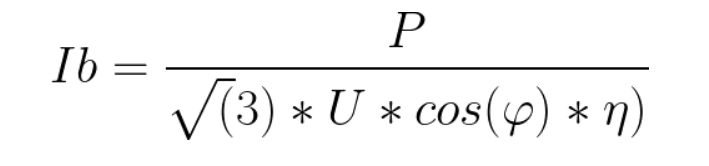
Ib = Belastningsstrøm
P = Motorens avgitte mekaniske effekt
U = Fasespenningen
Cos(Φ) = Motorens effektfaktor (Fra merkeskiltet.)
n = Motorens mekaniske virkningsgrad (Utelates når ikke oppgitt.)
Hvis det eventuelt også står oppgitt en mekanisk virkningsgrad (η) da skal denne ganges inn under brøkstreken. Hvis den ikke er oppgitt så kan den utelates. (Verdien er normalt nær 1.)
Vi kan bruke en webbasert «regnemaskin» som heter WolframAlpha til å gjennomføre denne utregningen.
Synkronhastigheten regnes ut i fra denne formelen:
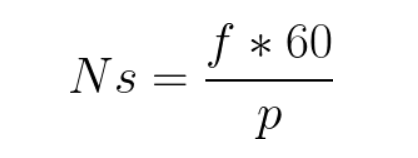
Ns = Synkronhastighet
f = Frekvens
p = Antallet polpar
Eksempel 1:
En trefase asynkronmotor har en drivspenning på 230 V. Avgitt effekt på akslingen er på 2.000 Watt og cos( Φ) = 0.85
Når vi setter inn i formelen så blir belastningstrømmen 5.9 A og utregningen er slik.
Eksempel 2:
En trefase asynkronmotor har en drivspenning på 400 V. Avgitt effekt på akslingen er på 2.000 Watt og cos( Φ) = 0.85
Når vi setter inn i formelen så blir belastningstrømmen 3.4 A og utregningen er slik.