Nå har vi faktisk en viss mulighet til å velge hva vi vil fokusere på den siste perioden fram mot ferien.
Tema 1: Pneumatikk og trykkluft.
Tema 2: Cybersikkerhet og styring av automatiserte anlegg via Internett.
Tema 3: Indistrirobot
Nå har vi faktisk en viss mulighet til å velge hva vi vil fokusere på den siste perioden fram mot ferien.
Tema 1: Pneumatikk og trykkluft.
Tema 2: Cybersikkerhet og styring av automatiserte anlegg via Internett.
Tema 3: Indistrirobot
Nå er det på tide å begynne å trene på teori og utspørring.
Her har vi en video om den piezo resistive trykk tranmitteren:
I forbindelse med målinger, inklusive innebygd i en piezo resistiv måletransmitter, så bruker vi oft en «Wheatstone målebro».
Her har vi også en video som forklarer grunnprinsippene for kalibrering av en trykksensor:
Det er også viktig at vi kjenner til og kan forklare prinsippene rundt DP-cellas virkemåte. Denne videoen har litt merkelig lyd, men jeg fant så langt ingen bedre enn dette:
I dag så fikk vi 4 av 5 reguleringstrainere til å kjøre. Neste steg blir å trene på optimalisering og utspørring og utspørring om teori knyttet opp mot proskjektet.
En av de viktigste tingene å lære seg i løpet av utdanningen som automatiker, det er å lære å bruke fabrikken eller leverandørens dokumentasjon for de komponentene som vi bruker. TIl eksamen for VG3 automatisering, så kan man få utlevert så mye som ca 180 sider dokumentasjon som man skal sette seg inn i. Det høres kanskje veldig mye ut, men dokumentasjonen til frekvensomformer og regulator i vårt prosjekt utfjør ca 50 sider.
Jeg påstet denne posten hjemmefra og uten tilgang til komponentene, men jeg håper at jeg husker de riktige parnummer og modeller:
Et instrument som vi også bør lære å bruke i forbindelse med feilsøking, det er sløyfekalibratoren. (Det er ikke nok «å få tingene til å virke». Det er like viktig, eller kanskje enda viktigere å lære «gode måter å jobbe på».
Noen av reguleringstrainerne inneholder også en elektromagnetisk flow sensor. Det er ikke så lett å forklare hvordan denne virker med bare ord, men en video kan vel gjøre susen.
Her har vi også en manual:
Vi jobbet med å få ferdig reguleringstraineren.
Vi må jobbe videre med å få ferdig trainerne og så må vi begynne å trene på utspørring.
Jeg laget også et nytt løsningforslag for PLS programmet, denne gang også med graf som viser nivået i tanken.
Det viste seg ellers også at på denne typen PLS så var det mulig å «koble opp» de analoge inn og utgangene direkte slik at det ikke var nødvendig å bruke «analoge variabler» eller «tagger».
Det viste seg også å være mulig å legge inn verdier for «skalering» direkte inn i hardware konfigurasjonen, slik at det heller ikke var nødvendig å bruke linerariseringsblokka i ladder programmet.
Programmet ble sånn sett litt «enklere» enn det ville blitt for mange andre typer PLS/HMI.
Det var en del feil i forrrige revisjon av programmet, slik som det normalt vil være. (HMI styrte ikke set/reset bits på riktig måte, og oppløsningen var feil på de analoge inn og utgangene.)
Programmet er nå rettet opp for feil, og det kjørte greit ved uttesting.
Nødtopp er foreløpig satt til å være en NO open bryter. Dette er gjort for at det skal være enkelt å teste ut programmet på taineren. Etterpå så må vi endre i programmet slik at vi får tilpasset for en NC nødstoppbryter.
Hvis vi skal oppnå en bedre indikering av de analoge verdiene på HMI’en så vil vi normalt bruke en lineariseringsblokk. Det viktigste er ikke å få tingene til å fungere, men å forstå hvordan tingene fungerer. For at prinsippene for de analoge målesignalene skal bli forstått på en brukbar måte, så utelater vi foreløpig lineraiseringsblokka.
I forbindelse med alarmer så er det vanlig å bruke en «bit» for å huske at alarmen har kommet på slik at man må resette alarmen. Det er mulig vi føyer dette til litt senere. Foreløpig så er det viktige «å forstå hvordan tingene fungerer».
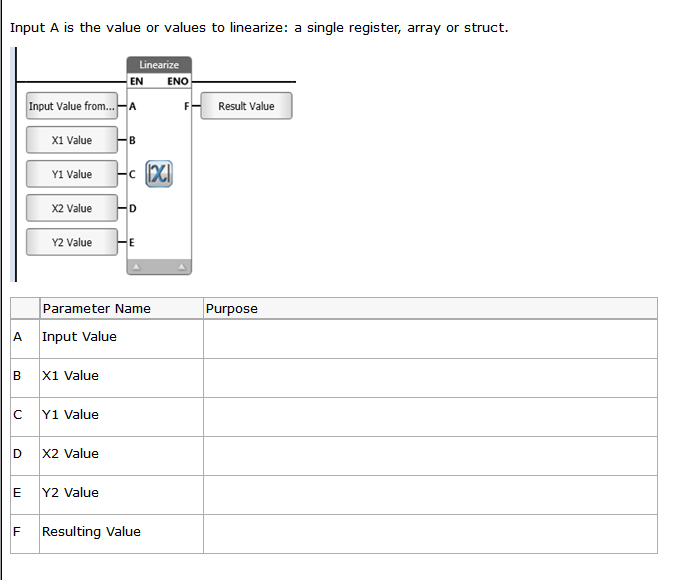
Her er en link til en beskrivelse av lineariseringsblokken. Den kan brukes til å regne om fra for eksempel fra 1-8192 (rådata) til for 0-100 (Presenterte data) Foreløpig så behøver vi ikke å bruke den, vi kan nøye oss med «rådata» fram til at vi har forstått dette godt nok.
Så kan de som eventuelt også ønsker det prøve ut lineariseringsfunksjonen. (Slik at for eksempel 4-20 mA kan perenteres som 0-100%)
Det er ellers kjempeviktig å forstå forskjellen på analog og digital signaloverføring for analoge data. Se figuren og beskrivelsen hos NDLA for beskrivelse av omforming fra analoge til digitale data.
På en PLS så har vi analog til digital omformere (A/D Convertere) på inngangen og digital til analogomformere (D/A Convertere) på utgangene.
Vi fikk laget en ny utgave av programmet som viser analoge verdier fra 0-100. Det er også lagt til kommentarer. Det viste seg at det ikke var nødvendig å bruke lineariseringsblokken. For denne typen PLS så viste det seg at det var mulig å legge inn skaleringen/lineariseringen i hardware konfigureringen.
Vi må jobbe med å gjøre ferdig traineren. Og så må vi også se på hvordan vi programmerer et HMI.
Første utgaver av et forlag til et enkelt program er foreløpig ikke testet på en virkelig PLS.
Vi jobbet med å gjøre ferdig traineren.
Vi jobbet med å gjøre ferdig traineren.